Lecture 4: Introduction to Reinforcement Learning
https://rail.eecs.berkeley.edu/deeprlcourse/deeprlcourse/static/slides/lec-4.pdf
Part 1
Reward functions
로 표현하는 보상함수는 어떤 state 와 action 이 좋은지 판별해주는 기준이다. 강화학습에서 앞으로의 timestep 에서 얻을 수 있는 미래의 보상을 크게 얻고자 한다.
Markov chain
- state space, state
- transition operator
“operator” (연산자) 로 부르는 이유는 각 상태에서의 전환될 확률 을 벡터 로 나타내면 transition probability 를 행렬 로 표현할 수 있고, 이를 행렬 곱으로 다음 상태 확률 벡터 를 구할 수 있기 때문이다.
Markov decision process
- state space, state
- action space, action
- transition operator (now a tensor! = 3D matrix)
이전과 마찬가지로 상태에서 전이할 확률 와 새로 더해진 행동이 선택될 확률 라고 하면 전이 행렬 로 표현할 수 있다. 즉, 에서 선택한 로 이 될 확률이다.
이를 선형방정식으로 표현하면 이 된다.
- reward function
Partially observed Markov decision process (POMDP)
이제 Markov decision process 에 observation space 와 emission probability 가 더해져 부분적으로 관측한 Markov decision process 가 구성된다.
The goal of reinforcement learning
NN 으로 구성한 policy 는 상태를 행동으로 맵핑한다. 이를 통해 이동한 다음 state 는 다시 policy 를 거쳐 action 을 선택한다.
이를 horizon 에 대해 에 도달할 때 까지의 궤적으로 표현할 수 있다.
Markov cahin 과 chain rule 을 통해 간략히 표현할 수 있다.
그리고 궤적 분포를 바탕으로 기댓값을 정의할 수 있다. 그러므로 기댓값을 최대화하는 매개변수 를 찾는 것으로 강화학습의 목표함수를 정의할 수 있다.
위의 궤적 분포 의 상태들이 이동하는 부분을 markov chain 으로 재정의할 수 있다. 즉, 주어진 에 대해 로 이동할 확률 로 표현된다.
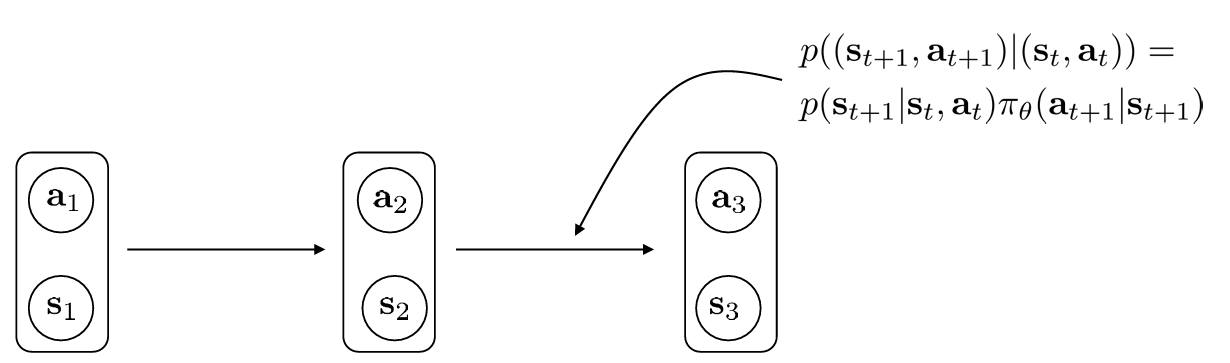
Finite horizon case: state-action marginal
이를 이용해 목적함수도 재정의할 수 있다.
Infinite horizon case: stationary distribution
여기에서 정해진 horizon 이 아니라 무한하게 된다면 어떻게 되는지 알아보자.
이 고정분포로 수렴하게 된다면 결국 로 표현가능하게 된다.
따라서 무한한 시간이 지나게되면 인 고정분포가 된다.
목적함수의 경우에는 가 무한할 떄 보상함수의 기댓값도 무한해지므로 discount factor 를 사용하거나 로 나눠 평균값을 얻는 방식이 있다.
위에서 얘기한대로 무한한 시간이 흐르면 결국 모든 항이 고정분포에 근접한 항들이므로 만큼의 시간에서 얻은 보상의 평균은 아래와 같이 생략된다.
Expectations and stochastic systems
보상이 scalar 이라 불연속적이고 미분불가능함에도 불구하고 강화학습에서 경사하강법 같은 최적화 방법을 사용할 수 있는 이유는
- not smooth 이지만 여기에서 좋은 행동을 선택할 확률이 매개변수 로 표현되기 때문이다.
즉, 이기 때문에 이에 대한 보상의 기댓값 은 에 대해 smooth 하다.
Part 2. Algorithms
The anatomy of a reinforcement learning algorithm
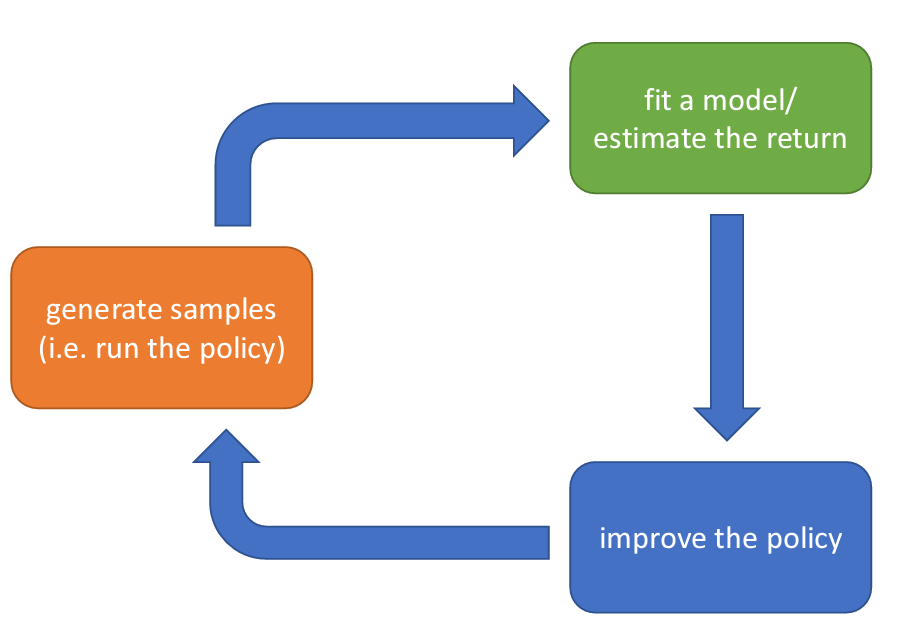
위와 같은 구조도로 RL 알고리즘이 작동한다.
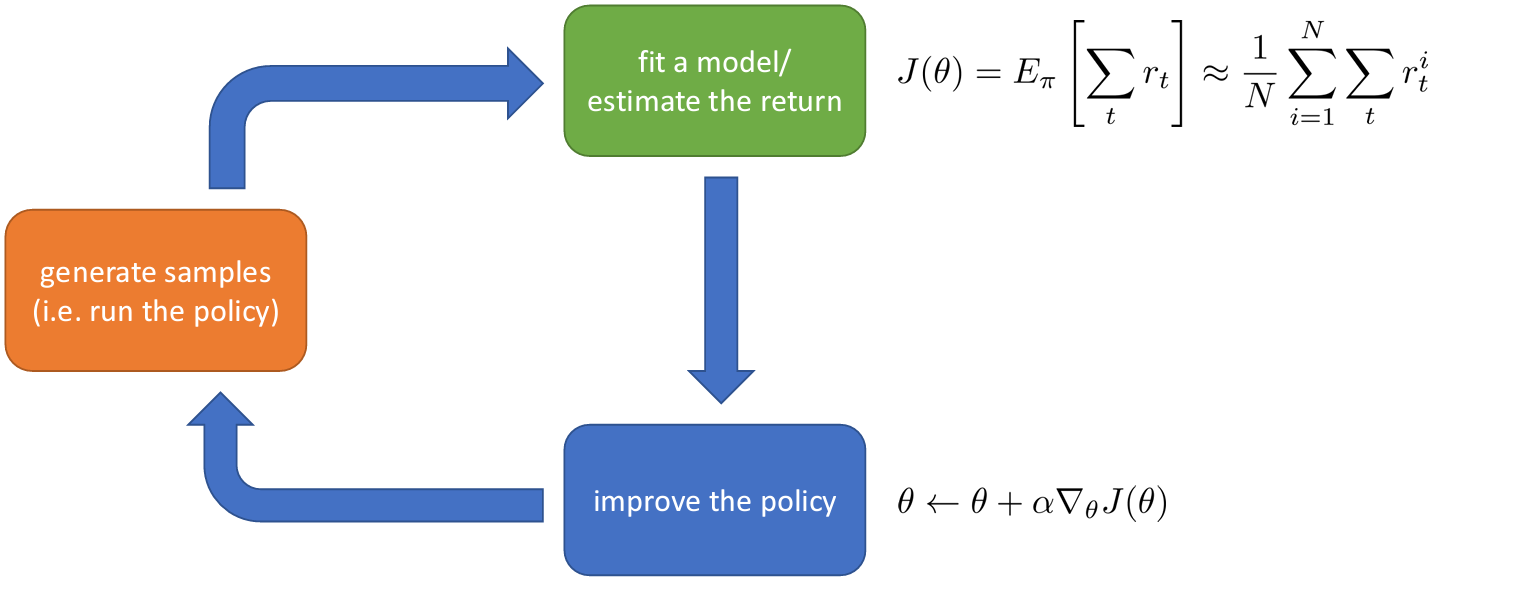
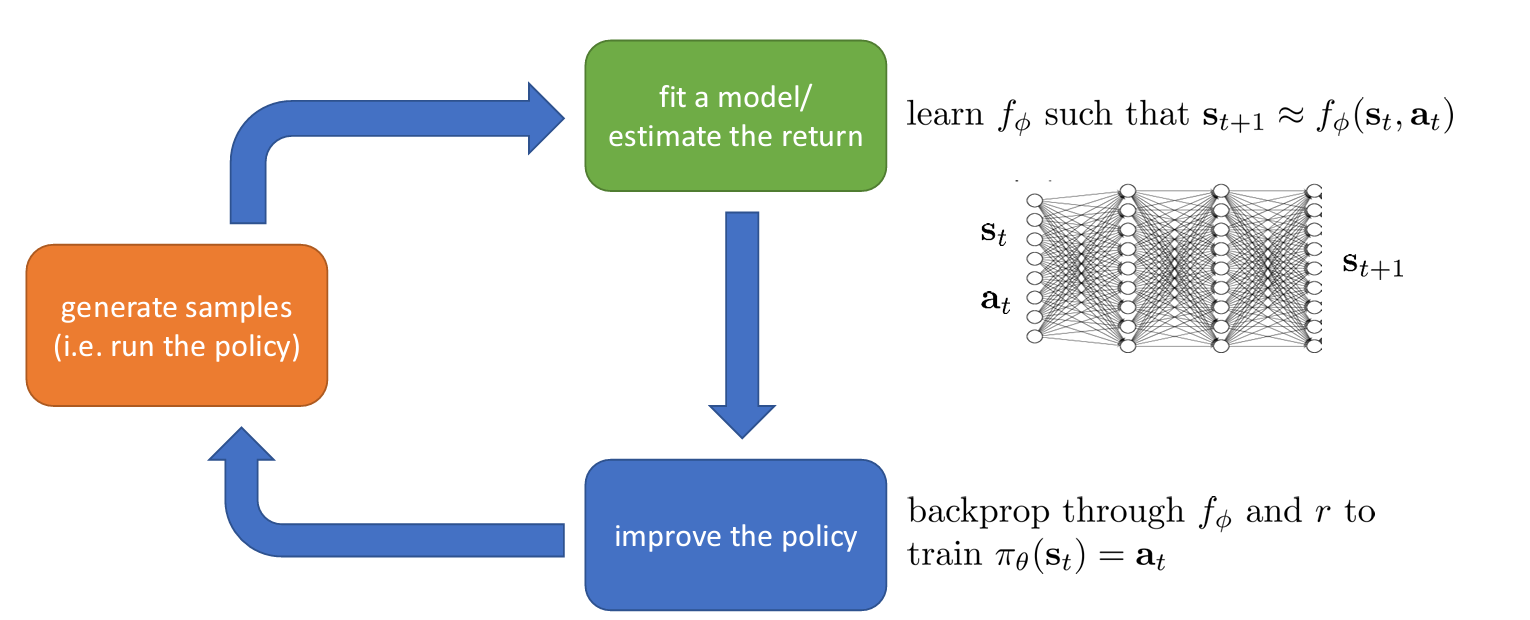
간단한 경우에는 보상을 합산하고 이를 이용해 정책을 개선할 수 있다.
신경망을 학습하는 경우에는 조금 더 복잡할 수 있다. 에서 로 이동하는 전이함수를 학습시키고, 역전파 과정을 통해 를 더 큰 을 얻도록 한다.
Whici parts are expensive?
위 과정 중에서 어떤 과정이 가장 비용이 많이 들까?
샘플을 생성하는 경우 실제 환경에서는 직접 샘플을 수집해야 하기 때문에 시간과 비용이 매우 많이 들 수 있다. 하지만 시뮬레이션을 통해 하는 경우 실제 시간의 몇 천~만 배 빠르게 수집할 수 있어 때로는 사소할 수 있다.
보상을 추정하는 경우에는 단순히 합산을 하므로 빠르고, 적은 비용이 들지만 신경망을 학습하는 경우에는 비쌀 수 있다.
마찬가지로 정책을 개선하는 경우도 상황에 따라 다르다. 앞으로 각 알고리즘을 살펴보며 어떤 부분에 집중하는지 혹은 비용이 많이 드는지 알아본다.
Part 3: Value Functions
How do we deal with all these expectations?
우리가 알고있는 기댓값 계산을 풀어적으면 연속적인 기댓값으로 이루어진 수식으로 표현된다.
연쇄되는 부분을 새로운 함수 로 표현하면 아래와 같이 정리된다.
Definition: Q-function
이는 에서 를 선택함으로써 얻는 전체 보상의 합이다.
Definition: value function
가치 함수는 에서 얻을 수 있는 전체 보상의 합이다. 그리고 이를 (4) 와 같이 를 이용해 표현할 수도 있다.
궁금한 점: (3) 에 있던 이 없는 이유는 식의 으로 표현되고, given 가 로 바뀌어서인가?
이제 강화학습의 목적함수는 아래와 같이 간단히 표현된다.
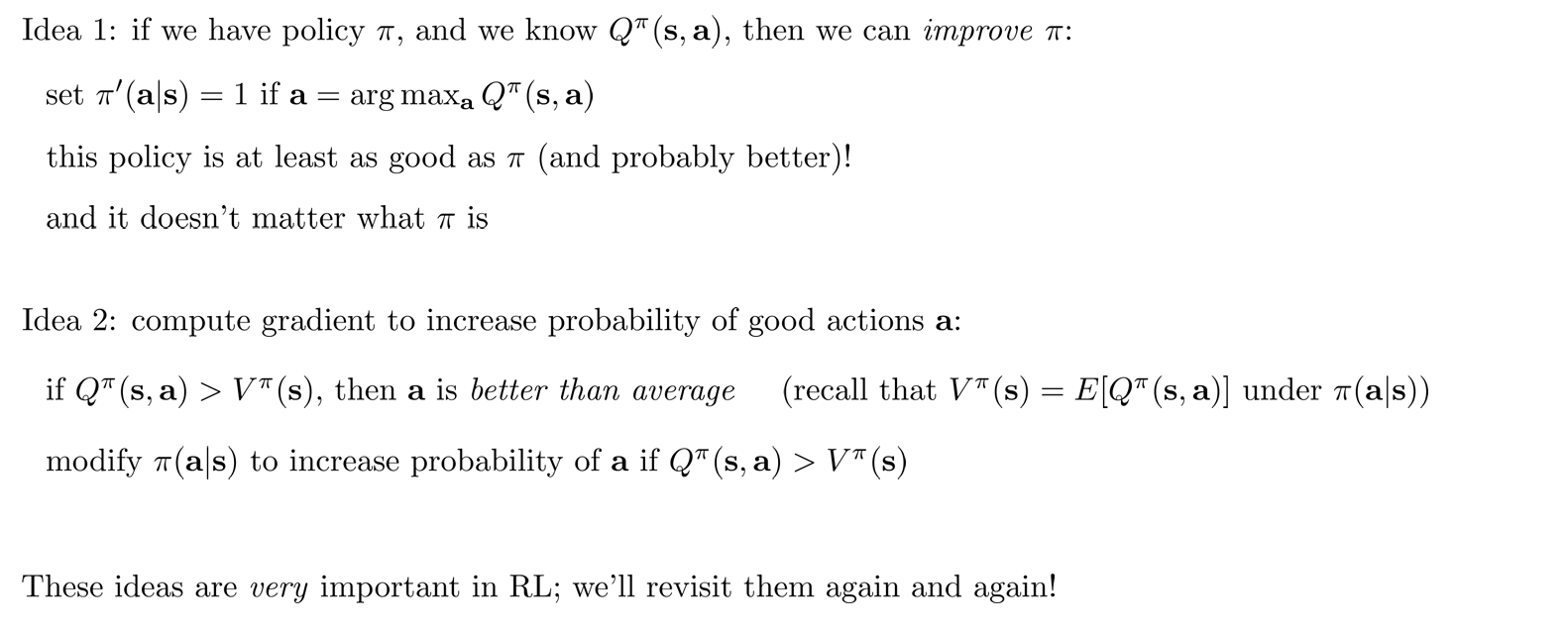
Using Q-functions and value functions
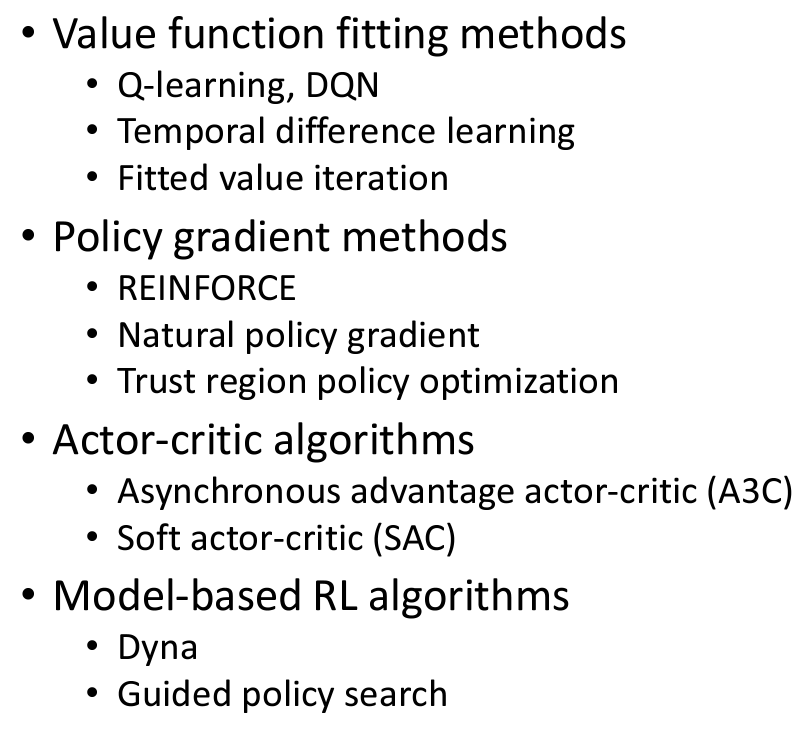
Part 4: Types of Algorithms
Part 5: Tradeoffs Between Algorithms
Why so many RL algorithms?
- Difference tradeoffs
- Sample efficiency
- Stability & ease of use
- Different assumptions
- Stochastic or deterministic?
- Continuous or discrete?
- Episodic or infinite horizon?
- Different things are easy or hard in different settings
- Easier to represent the policy?
- Easier to represent the model?
Comparison: sample efficiency
- Sample efficiency = how many samples do we need to get a good policy?
- is the algorithm off policy?
- Off policy: 새로운 샘플을 만들지 않고 정책을 개선
- On policy: 정책이 바뀔 때마다 새로운 샘플을 만들어야 함
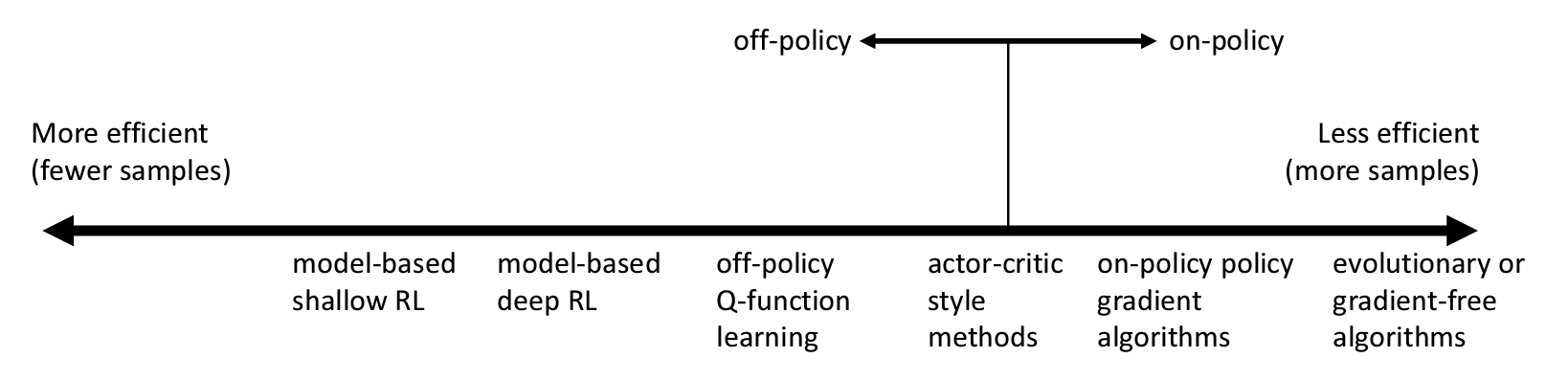 효율성이 떨어지는 알고리즘을 쓰는 이유는 다른 장단점이 상황에 따라 유리하지 않을 수 있기 때문이다.
효율성이 떨어지는 알고리즘을 쓰는 이유는 다른 장단점이 상황에 따라 유리하지 않을 수 있기 때문이다.
예를 들어 계산 시간이 매우 빨라 새로운 샘플을 만드는 것이 크게 시간이 많이 들지 않는 경우에는 샘플 효율성을 크게 신경쓰지 않아도 된다.
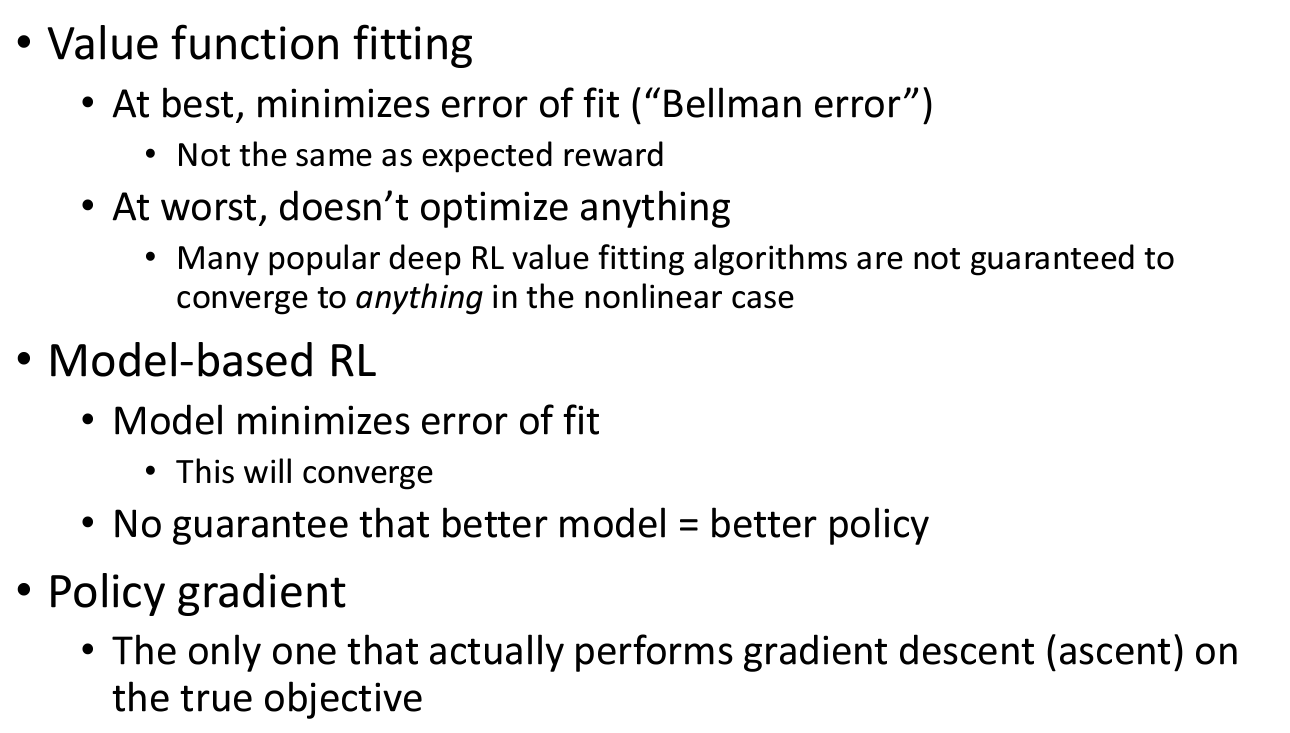
Comparison: stability and ease of use
- Does it converge?
- And if it converges, to what? local minima?
- And does it converge every time?
이러한 질문들이 필요한 이유는 Supervised learning 과 강화학습은 때때로 경사하강과 관련이 없기 때문이다.
Comparison: assumptions
Part 6: Examples of Algorithms
Examples of specific algorithms