Quasi-Newton
Quasi-Newton method 란 무엇일까? 위키피디아 를 바탕으로 간단히 살펴보고, 어떤 알고리즘들이 주로 사용되는지와 장단점을 알아보자.
Quasi-Newton methods
Quasi-Newton method 란 목적함수의 영점이나 극소/극대값을 찾기 위한 방법이다.
Newton’s method 는 Jacobian 이나 Hessian 이 있어야 영점이나 극값을 찾을 수 있다. 반면 Quasi-Newton method 는 이러한 Jacobian 이나 Hessian 을 사용할 수 없거나 매번 계산하기 매우 어려운 경우에 사용할 수 있다.
Search for zeros: root finding
위에서 말한 영점을 찾는 다는 것은 목적함수의 해를 구하는 것이다.
Newton’s method 에서는 에서의 Jacobian 의 left inverse 에 대해 아래와 같다.
여기서 목적함수 는 다변수 함수이다.
여기에서 를 대체해서 푸는 모든 방법들이 quasi-Newton method 에 속한다.
대개 극값을 찾기 위한 방법은 대칭인 행렬을 필요로 해서 이러한 방법들을 해를 찾는데 사용하는 것은 좋지 않다고 한다.
Search for extrema: optimization
Gradient 의 해를 구한다는 것은 원래 함수의 극값을 찾는 것과 같으므로 quasi-Newton method 는 극값을 찾는데 사용될 수 있다. 즉, 가 의 gradient 라면 의 Jacobian 은 의 Hessian 이 된다.
이렇게 찾은 극값은 목적함수의 local maxima and minima 가 된다.
Newton method expansion
Newton method 에서는 최적해 근처에서 수식을 이차 테일러 급수식으로 근사화하고 일, 이차 도함수를 통해 최적해를 찾는다.
이 때 는 이계도함수를 갖고 초기값 에서 인 를 찾고자 한다.
iteration 을 통해 부터 까지의 를 찾고자 로 두면 위의 근사식을 미분하여 를 찾을 수 있다.
Note
- 위의 이차 근사식이 이러한 미분을 통해 최솟값을 찾는 것이 보장되려면 함수 가 convex 해야 한다.
- 즉, 이어야 한다.
따라서 식을 정리해보면 아래와 같다.
더 높은 차원에서는 이차 도함수의 Hessian 을 사용하는데, quasi-Newton 에서는 이를 필요로하지 않는다.
대신 연속적인 gradient 를 통해 Hessian 을 업데이트한다.
Quasi-Newton method expansion
Quasi-Newton methods 는 secant method 의 방법을 일반화 한것으로 고차원에서는 secant equation 이 under-determined 이므로, 이를 어떤 제약조건을 통해 해를 구하는지에 따라 달라진다. (보통은 Hessian 의 현재 추정치에 간단한 low-rank 업데이트를 통해 이루어진다.)
가장 많이 사용되는 quasi-Newton 알고리즘은 SR1 formula, BHHH method, BFGS method 와 적은 메모리를 사용하는 L-BFGS 가 있다.
그 중, SR1 fomula 는 업데이트하는 행렬의 positive-definiteness 를 보장하지 못해서 indefinite problem 에 사용된다.
Quasi-Newton method 가 Newton method 보다 갖는 큰 장점 중 하나는 Hessian 의 역행렬을 구할 필요가 없다는 것이다. 대신 의 근사를 직접 만들어 사용한다.
Newton method expansion 처럼 이차 테일러 급수로 목적함수 를 표현해보자.
이 때 는 gradient 이고 는 approximation to the Hessian matrix 이다.
이를 미분한 값이 0 이라고 하면 Newton step 를 구할 수 있고, 수식은 아래와 같다.
Hessian 의 근사인 은 secant equation 인 를 만족해야 한다. 이는 gradient 의 일차 테일러 근사와 같다.
주로 초기값 는 로 사용하고 빠른 수렴에 충분하다. 는 positive-defininte 해야 한다.
그리고 현재 추정한 Hessian 행렬 를 이용해 아래와 같이 다음 를 업데이트 한다.
- , 는 Wolfe condition 만족하도록 한다.
- 이를 이용해 를 수행한다.
위에서 구한 값들은 approximate Hessian 를 업데이트하거나 역행렬 을 구하기 위해 다시 사용된다.
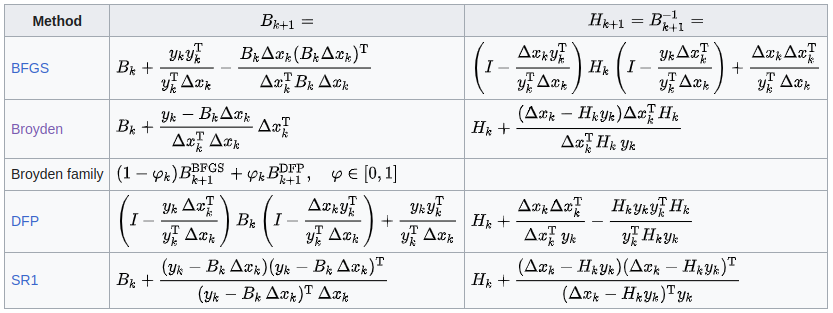
많이 사용되는 업데이트 방식은 아래 표와 같다.
BFGS
BFGS 알고리즘은 Broyden-Fletcher-Goldfarb-Shanno 의 약자로 unconstrained nonlinear optimization porblem 을 iterative 하게 풀어내는 방법으로 주로 사용된다.
BFGS 알고리즘은 gradient evaluation 로 얻은 Hessian 의 loss function 을 점진적으로 개선하면서 curvature 정보로 gradient descent 의 방향을 결정한다.
BFGS 의 curvature 행렬을 업데이트하는데 역행렬이 필요하지 않아 복잡도는 이다. (Newton’s method 는 이다.)
Rationale
이고 미분가능한 인 최적화 문제가 있다.
초기값 으로부터 최적해를 구하기 위해 매번 반복적을 업데이트해간다.
Search direction (or descent direction) 는 번째에서 추정한 Hessian 행렬 에 대해 아래와 같이 표현된다.
이는 위에서 다룬 Newton equation 의 수식 에서 유도되었다.
그리고 이 때의 는 를 풀어내 다음 을 찾는데 사용된다.
를 업데이트 할 때 사용되는 secant equation 은 와 에 대해 아래와 같이 표현할 수 있다.
그리고 이 positive definite 하도록 곡률 조건 을 만족해야 한다. ()
을 완전히 계산하는 대신 에 두 행렬을 더해 구할 수 있다.
이 와 는 symmetric rank-one matrices 이고 그들의 합은 rank-two update matrix 이어야 한다.
따라서 BFGS 와 DFP 의 업데이트된 행렬은 이전 행렬에 rank-two 행렬만큼 달라진다.
의 symmetry 와 positive definiteness 를 유지하기 위해 로부터 와 를 골라 아래와 같이 업데이트를 정할 수 있다.
Algorithm
Rationale를 바탕으로 전체 알고리즘과 역행렬 근사하는 부분까지 정리해보자.
풀어내려는 unconstrained optimization problem는 다음과 같다.
초기 추정값 과 Hessian 의 초기 추정값 , 어떤 로부터 수렴할 때() 까지 아래 단계를 반복한다.
Algorithm
- 를 풀어 를 구한다.
- Line search 를 통해 적절한 step size 를 찾는다. 로 구하거나 Wolfe condition 을 만족하는 를 찾는다.
- 을 구한다.
알고리즘의 첫 번째 step 에서 필요한 의 역행렬은 5번째 스텝에 Sherman-Morrison formula 을 적용하여 매우 효과적으로 구할 수 있다.
이는 아래와 같은 전개를 통해 효율적으로 풀어진다. 이 대칭행렬이고 와 이 스칼라임을 이용한다.
따라서 Hessian 행렬을 그대로 이용하지 않고 역행렬을 구할 수 있다.:
초기 추정값 과 Hessian 역행렬 을 가지고 수렴할 때 까지 아래 단계를 반복하여 수행한다.
Algorithm
- 를 풀어 를 구한다.
- Line search 를 통해 적절한 step size 를 찾는다. 로 구하거나 Wolfe condition 을 만족하는 를 찾는다.
- 을 구한다.
- .
Further developments
BFGS 업데이트는 가 완전히 양수인 조건에 크게 의존한다. 이는 convex target 에 대해 Wolfe condition 을 만족하며 line search 를 수행해야 하는데, Sequential Quadratic Programming 같은 경우에서는 음수나 거의 0에 가까운 곡률을 얻기도 한다.
따라서, 이러한 경우에는 나 를 적절히 변경하는 damped BFGS 라고 불리는 업데이트를 수행하기도 한다.
Limited-memory BFGS
L-BFGS 는 앞서 다룬 BFGS 에 제한된 메모리를 사용하는 방법이다.
앞선 알고리즘은 거의 동일하지만 BFGS 는 dense 한 크기의 Hessian 역행렬을 저장하고 있는 반면, L-BFGS 는 몇 개의 vector 만 저장한다.
이 때의 은 풀어내야 하는 문제의 변수의 갯수이므로 많은 변수를 가지고 있는 최적화 문제를 풀어낼 때 L-BFGS 가 적합한 방법이다.
L-BFGS 는 를 모두 저장하는 대신 지난 개의 업데이트에서의 와 를 저장한다.
Algorithm
L-BFGS 는 다른 quasi-Newton 방식과 매우 비슷하지만 approximate Newton’s direction 인 와 현재 gradient , Hessian 역행렬 에 대해 matrix-vector multiplication 를 수행한다는 점에서 차이가 있다.
이전 update 를 이용해 이 를 구하는 여러 연구들이 진행되었지만 가장 널리 사용되는 방법은 “two-loop recursion 이다.
주어진 와 에 대해 아래 를 지난 업데이트 동안 갖고 있다고 가정한다.
이를 가지고 를 구한다.
그리고 번 째에서 초기 Hessian 역행렬을 이라고 한다. 위 BFGS 에서 정리한 역행렬 계산을 로 정리하면 아래와 같다.
고정된 에 대해 벡터의 수열 을 와 로 정의한다.
그리고 로부터 를 계산하기 위한 재귀적 알고리즘을 를 이용해 로 설정한다.
또 다른 벡터의 수열 을 로 정의하면 이 벡터들을 계산하기 위한 또 다른 재귀적 알고리즘은 로부터 시작하여 와 를 재귀적으로 푸는 것으로 정의한다.
그러면 값은 ascent direction 이 되고 이를 이용해 descent direction 을 다음과 같이 계산할 수 있다:
즉, 부터 구해낸 까지 구해낸 후에 이를 이용해 다시 를 구한다.
그렇게 하면 앞서 언급한 approximate Newton’s direction 인 를 얻게 된다.
일 때 자세히 유도과정을 설명한 포스트가 Derivation of LBFGS 에 있으니 참고하면 좋다.
초기 행렬 의 scaling 은 검색 방향이 잘 scaling되어 있음을 보장하여 대부분의 iteration 에서의 unit step length 가 수용된다.
Wolfe line search 를 통해 곡률 조건 이 만족되고 안정적인 BFGS 업데이트를 보장한다. 일부 소프트웨어 구현에서는 Armijo backtracking line search 를 사용하지만, 선택된 step 으로 인해 곡률 조건 이 만족되는 것을 보장할 수 없다.
일부 구현에서는 가 음수이거나 너무 0에 가까울 때 BFGS 업데이트를 건너뛰어 처리하기도 한다. 그러나 이 방법은 Hessian 근사치 가 중요한 곡률 정보를 포착할 수 있도록 업데이트를 너무 자주 건너뛰게 될 수 있다. BFGS 에서 언급한대로 일부 sover 는 곡률 조건을 만족시키기 위해 와 를 수정하는 damped (L)BFGS 업데이트를 사용한다.
two-loop recursion 방식은 Hessian 의 역행렬을 곱셈하는 효율성 때문에 unconstrained optimization 에 널리 사용된다고 한다. 이 외의 접근 방식으로 Hessian 이나 그 역행렬의 low-rank 표현을 사용하는 것도 있다고 한다. 이는 Hessian 을 diagonal 행렬과 low-rank 업데이트의 합으로 나타내는 것으로 SQP 와 같은 constrained problem 에서 L-BFGS 를 사용할 수 있도록 해준다.
L-BFGS-B
L-BFGS 의 파생 중에 관심갔던 알고리즘은 L-BFGS-B 이다. 왜냐하면 L-BFGS 간단한 bound constraints ()를 다룰 수 있도록 한 알고리즘이기 때문이다.
Comparison with Other Solvers
여타 많은 알고리즘들과 차이가 궁금하였다. 예를 들어, 딥러닝에서는 Adam optimizer 를 대개 사용하는데 이러한 방식과 BFGS 방식과의 차이점을 찾아보았다.
L-BFGS vs Adam
ADAM 은 모든 dimension 에서 step size 를 조정하는 first order 방법이다. 어떤 의미에서는 이것은 모든 단계에서 diagonal Hessian 을 구성하는 것과 비슷하지만, 단순히 과거의 gradient 를 사용하여 수행한다. 이런 식으로 하면 여전히 first order 방법이지만 second order 방법인 것처럼 작동하는 이점이 있다.
각 차원을 따라만 추정하고 Hessian 에서 대각선을 벗어난 부분을 고려하지 않는다는 점에서 L-BFGS 보다 더 부족한 추정치이다. Hessian 이 거의 singular 하면 diagonal 을 벗어난 부분이 곡률에 중요한 역할을 할 수 있으며 이러한 경우 ADAM 은 BFGS 에 비해 성능이 저하될 가능성이 높다.
Benchmark
여러 quasi-Newton method 혹은 다른 gradient descent 와 같은 알고리즘들 중에서 어떠한 것이 우수한지, 혹은 unconstrained optimization 에서 가장 적절한지 궁금하였다.
우선 Mantid 라는 데이터 사이언스에서 사용하는 라이브러리에서 제시된 비교가 있었다.
자세한 알고리즘의 종류와 풀어낸 문제는 사이트 를 참고하자.
Nonlinear regression problem 을 풀었는데 정확도와 런타임에 대해 아래와 같이 결과가 나왔다.


보다시피 SLAM 분야에서 least-square 를 구하기 위해 사용되는 Levenberg-Marquardt 나 Damping 방식이 전반적으로 우수하였고, 그 뒤이어 Simplex 나 BFGS 가 있었다. L-BFGS 에 대해서는 다뤄지지 않기는 하였으나 BFGS 가 좋지 않은 이유는 풀어내는 문제가 regression 이었기 때문으로 보인다.
References