Online Whole-body Motion Planning for Quadrotor using Multi-resolution Search
Y. Ren, S. Liang, F. Zhu, G. Lu and F. Zhang, “Online Whole-Body Motion Planning for Quadrotor using Multi-Resolution Search,” 2023 IEEE International Conference on Robotics and Automation (ICRA), London, United Kingdom, 2023, pp. 1594-1600, doi: 10.1109/ICRA48891.2023.10160767.
Liu et al. 과 Han et al. 이 가지고 있는 문제를 일부 해결하면서 모르는 지도에 대한 최적 경로 생성에 대한 논문으로, 대다수는 GCOPTER 논문을 기반으로 하되 프레임 워크를 제안하였다.
주요 contribution
- 좁은 지역은 full pose (=) planning을 하고 이외의 지역은 position planning을 하도록 하는 hierachical framework 를 제안
- 라이다를 이용해 모르는 지형에서 비행이 가능하고 제안한 프레임 워크를 통해 온보드로 컴퓨팅이 가능함
문제점
- 오픈 소스로 내용을 공개하지 않았다
- 그리고 에서 타원체로 모델링 하는 것에서 이슈가 발생할 수 있음
- 새로 제안한 여러 방식에서 개선점이 있을 수 있음
- Parallel multi-resolution search: 더 복잡한 환경 혹은 틈과 넓은 공간이 같이 있는 경로에서 비효율적인 경로 계획 가능
- Seed generation method: 기존 polyhedron 생성 방법에서 overlap이 생기는 것을 개선하고자 도입한 방식인데, 방식이 명료하지 않음.(그러나 코드가 공개되지 않아서 어떤 식으로 실험에서 적용하였는데 불분명함)
- 와 경로 간의 연결
Introduction
planning 논문들과 planning 논문들을 제시하고 단점들을 지적하는 부분들만 요약해서 정리함.
Simply ignore the shape and orientation of the drone
- Jesus Tordesillas, Brett T Lopez, Michael Everett, and Jonathan P How. Faster: Fast and safe trajectory planner for navigation in unknown environments. IEEE Transactions on Robotics, 38(2):922–938, 2021.
- Xin Zhou, Zhepei Wang, Hongkai Ye, Chao Xu, and Fei Gao. EGO-Planner: An ESDF-free gradient-based local planner for quadrotors. IEEE Robotics and Automation Letters, 6(2):478– 485, 2021.
- Yunfan Ren, Fangcheng Zhu, Wenyi Liu, Zhepei Wang, Yi Lin, Fei Gao, and Fu Zhang. Bubble planner: Planning high-speed smooth quadrotor trajectories using receding corridors. arXiv preprint arXiv:2202.12177, (Accepted by 2022 IROS), 2022.
- Boyu Zhou, Fei Gao, Jie Pan, and Shaojie Shen. Robust real-time UAV replanning using guided gradient-based optimization and topological paths. In 2020 IEEE International Conference on Robotics and Automation, pages 1208–1214. IEEE, 2020.
- Sikang Liu, Nikolay Atanasov, Kartik Mohta, and Vijay Ku-mar. Search-based motion planning for quadrotors using linear quadratic minimum time control. In 2017 IEEE/RSJ international conference on intelligent robots and systems (IROS), pages 2872–2879. IEEE, 2017.
위 논문들은 드론 모델링을 구로 하거나 orientation 을 무시하여 에서 플래닝하는 선행 연구들이다.
잘 알려진 Faster (T-RO 논문)과 EGO-Planner와 Bubble Planner도 보이고 앞서 정리했던 Search-based planning using LQMTC 논문도 보인다.
이러한 방식은 앞서 여러차례 다뤘던 대로 자세를 고려하지 않아 보수적으로 비행하고 dynamically feasible 하다고 보기 어렵다.
planning 논문들의 큰 문제 중 하나는 unknown and unstructured 환경에서 경로 계획하지 않는다는 것이다.
. but assumptions on the environment (small gaps)
- Giuseppe Loianno, Chris Brunner, Gary McGrath, and Vijay Kumar. Estimation, control, and planning for aggressive flight with a small quadrotor with a single camera and imu. IEEE Robotics and Automation Letters, 2(2):404–411, 2016.
- Toru Hirata and Makoto Kumon. Optimal path planning method with attitude constraints for quadrotor helicopters. In Proceedings of the 2014 International Conference on Advanced Mechatronic Systems, pages 377–381. IEEE, 2014.
- Jiarong Lin, Luqi Wang, Fei Gao, Shaojie Shen, and Fu Zhang. Flying through a narrow gap using neural network: an end-to-end planning and control approach. In 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 3526–3533. IEEE, 2019.
- Shaohui Yang, Botao He, Zhepei Wang, Chao Xu, and Fei Gao. Whole-body real-time motion planning for multicopters. In 2021 IEEE International Conference on Robotics and Automation (ICRA), pages 9197–9203. IEEE, 2021.
- Zhepei Wang, Xin Zhou, Chao Xu, and Fei Gao. Geometrically constrained trajectory optimization for multicopters. IEEE Transactions on Robotics, 2022.
위 논문들은 지나가야 하는 틈에 대해 미리 알고 있는 것을 전제로 경로 계획이 이루어 져서 실제 환경에서 사용하기에는 어렵거나 전역 지도가 필요했다.
Han et al. 논문에서 언급되었듯이 [6]-[8] 은 틈을 지나는 것에만 초점을 많이 맞추었고, [9] 는 이전 Post 에서 다루었고 [10] 은 GCOPTER 논문이다.
또 다른 기존 Planning 연구의 문제점으로 꼽은 것은 연산 효율성이다. 아마도 본 연구의 contribution을 강조하고자 넣은 것으로 보이는데, 아래 연구들을 꼽으며 수백 에서 수 초의 연산이 걸린다고 한다.
Recent online planning researchs
- Zhichao Han, Zhepei Wang, Neng Pan, Yi Lin, Chao Xu, and Fei Gao. Fast-racing: An open-source strong baseline for se(3) planning in autonomous drone racing. IEEE Robotics and Automation Letters, 6(4):8631–8638, 2021.
- Sikang Liu, Kartik Mohta, Nikolay Atanasov, and Vijay Kumar. Search-based motion planning for aggressive flight in se (3). IEEE Robotics and Automation Letters, 3(3):2439–2446, 2018.
Sikang 논문 과 같이 묶여서 까인 느낌이 있지만, Han et al. 의 경우에도 이전 경로 계획을 필요로 하고 사실 Yang et al. 논문을 GPU 병렬 컴퓨팅으로 최적화 한 것이므로 여전히 꽤 많은 시간이 소요된다고 볼 수 있다.
따라서 본 연구에서는 Multi-resolution search method 를 통해 넓은 지역에서는 planning 을 수행하고 online planning 중 발견되는 좁은 틈에 대해서 planning 을 수행하여 위 문제들을 해결하고자 한다.
Related Works
위에서도 충분히 선행 연구에 대한 논의가 이루어져서 필요한 부분 위주로만 요약.
위에서 [1]-[3] (Faster, EGO, Bubble-planner) 과 아래 두 논문들은 기체를 구로 모델링하여 configuration space 를 쉽게 구성할 수 있었고 장애물 회피에 대한 보수적인 가정이 전제된 planning 을 수행하였다.
Quote
- Boyu Zhou, Fei Gao, Luqi Wang, Chuhao Liu, and Shaojie Shen. Robust and successful quadrotor trajectory generation for fast autonomous flight. IEEE Robotics and Automation Letters, 4(4):3529–3536, 2019.
- Fanze Kong, Wei Xu, Yixi Cai, and Fu Zhang. Avoiding dynamic small obstacles with onboard sensing and computation on aerial robots. IEEE Robotics and Automation Letters, 6(4):7869–7876, 2021.
그리고 [9]-[11] 인 Yang et al., GCOPTER, Han et al. 논문들이 optimization-based 방식의 최신 논문들인데, 문제점으로 꼽은 것들은 아래와 같다.
우선 최적화 전에 수행되는 전역 경로 탐색을 포함하면 수백 가 소요된다는 점과, collision-free 를 위해 사용되는 flight corridor 방식이 때때로 infeasible 하여 좁은 틈을 지나는 것에 실패하는 경우가 있다는 것이다.
본 연구는 GCOPTER 논문의 대부분 방식을 사용하되 와 planning 을 혼합하고 flight corridor 를 일부 수정하여 주어진 지도 없이, 실시간으로 좁은 틈을 높은 성공률과 적절한 컴퓨팅 시간 으로 비행토록 하였다.
Preliminaries
A. System Modeling and Polynomial Trajectory
여기는 많이 다뤘던 differentially flat system 에 대한 내용이다. 다른 논문들에서는 yaw angle trajectory 를 0으로 두는 경우가 많았는데 여기서는 진행 방향을 바라볼 수 있도록 의 법선 방향으로 설정하였다.
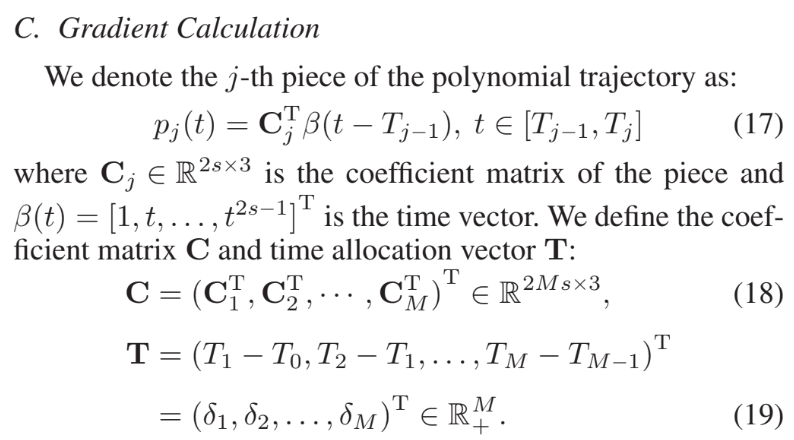
그리고 kinodynamic constraints 또한 이를 이용해 속도, 가속도, jerk 의 상/하한으로 두었다. GCOPTER 논문 방식을 차용하여 piece-wise polynomials 로 경로를 표현하여, 다항식 계수와 시간 벡터로 정의하였다.
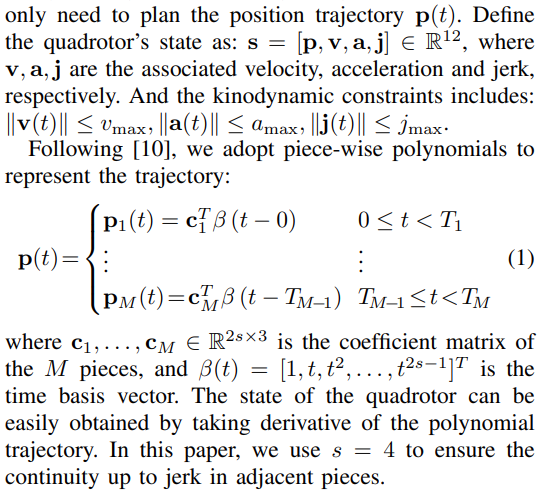
여기서 살짝 헷갈리는 부분은 으로 이전 논문들과 크기가 동일한데, 로 두어 jerk 까지 연속적일 수 있도록 하였다고 한다.
이전 논문에서는 으로 두고 snap 까지 연속적이라고 표현하였다. (아래 이미지)
보다시피 boundary condition 이므로 차수는 까지여서 두 벡터들(다항식 계수, 시간 기저 벡터) 크기가 같다.
Question
- 값에 따른 다항식 궤적 연속성
- 우선 주어지는 initial and final state 의 크기에 따라 다항식의 계수와 차수가 정해진다.
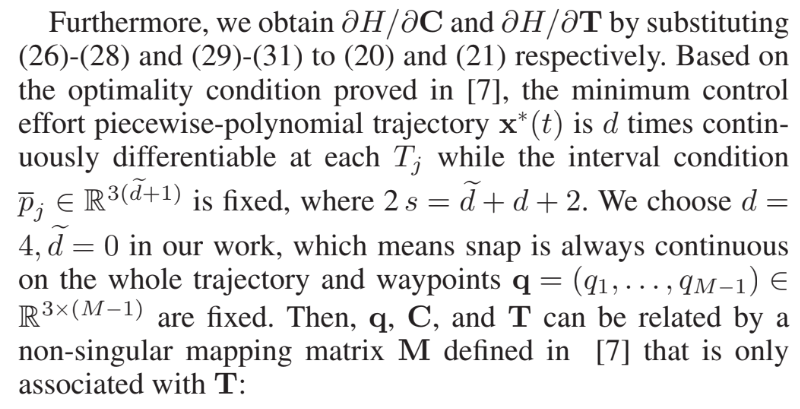
- 본 논문에서는 로 initial and final state 를 주므로 가 맞고 7차 다항식이 만들어지며 이는 jerk 까지 연속성을 필요로 한다. 또한, control input으로 snap을 사용하는 것으로 보인다.(논문 설명 모두 맞음)
- 이전 논문에서는 으로 사용하고 jerk 를 control input 으로 사용한다. 그렇다면 snap is always continuous on the whole trajectory 가 혼동된다.
- jerk를 control input 으로 하면 시작과 마지막 state 는 가속도까지 정보를 준다는 것이다. 대신 중간 waypoint의 위치가 주어지므로 Optimality Condition 에 의해 4차인 snap 까지 연속적이다.
- 그렇다면 본 논문에서는 각 piece-wise polynomials 간의 연속을 위해 추가적인 조건이 필요하지 않나?
B. Safety Constraints
collision-free 한 경로를 위해 safe flight corridor (SFC) 를 사용한다.
각 경로 계획 방식에 따라 다른 모델링을 사용한다. 에서는 효율성을 위해 가장 긴 축의 길이 의 반지름을 가지는 구로 표현한다.
그리고 드론 모델을 점으로 표현하는 대신 장애물들을 만큼 확장하여 생각하면 (the configuration space by inflating all obstacle points with ) 아래와 같은 수식으로 SFC 를 표현할 수 있다.
그리고 에서는 타원체를 도입하여 Liu et al. 과 같이 사용할 수 있다. 다만, Liu et al. 에서는 타원체와 장애물 점과의 교점을 샘플링을 통해 판단하였지만, 여기서는 -representation 방식으로 표현하였다. 번째 polyhedron 안에 있는 번째 궤적 에 대해 SFC 수식은 아래와 같다.
이 때 는 rotation matrix 이고 로 타원체 모양을 표현한 것이다.
부분은 unit sphere에 대해 타원체의 크기만큼 원래의 polyhedron이 떨어져 있는지로 이해하였다. 즉 원래의 CoM 대신 타원체 크기만큼 충돌하지 않는지를 판단하는 것이다.
Note
- Yang et al. 에서는 Liu et al. 에서 타원체로 모델링 한 것을 비판하면서 장축의 길이로만 하면 CoM 이 중앙이 아닌 경우에 발생할 수 있는 점을 지적했다.
- 그래서 Yang et al. 과 Han et al. 에서는 vertex 를 가지고 모델링 하여 직육면체나 다면체로 모델링하였다.
- 본 논문에서는 그럼에도 타원체를 사용한 이유가 무엇일까? 연산 속도를 줄이기 위함이나 타원체 만으로도 충분히 장애물 회피가 잘 되어서인가?
C. Trajectory Generation
planning 은 주어진 start state 와 goal state 를 가지고 collision-free 하고 kinodynamic constraints 를 만족하는 경로를 생성한다.
RILS
- S. Liu et al., “Planning dynamically feasible trajectories for quadrotors using safe flight corridors in 3-D complex environments,” IEEE Robot. Automat. Lett., vol. 2, no. 3, pp. 1688–1695, Jul. 2017.
이전 Fast-racing(Han et al.) 에서도 언급된 RILS 방식으로 SFC 를 연속적으로 만들고 GCOPTER 논문의 MINCO 경로 최적화로 생성한다.
그리고 경로 생성은 마찬가지로 GCOPTER 논문 방식을 사용한다.
Planner
A. Colliding Segments Extraction
우선 장애물을 고려하지 않고 Linear Quadratic Minimum Time 문제를 푸는 방식으로 global start state 와 global goal state 간의 경로를 생성한다.
Note
- 논문 notation 에서 global start state 와 이전 챕터 goal state 의 표현이 겹친다.
LQMT
- Mark W Mueller, Markus Hehn, and Raffaello D’Andrea. A computationally efficient motion primitive for quadrocopter trajectory generation. IEEE transactions on robotics, 31(6):1294– 1310, 2015.
다른 논문들에서 지적할 수 있는 전역 경로 생성을 로 하여 dynamics 가 고려되지 않은 부분을 해결한 것으로 보인다.
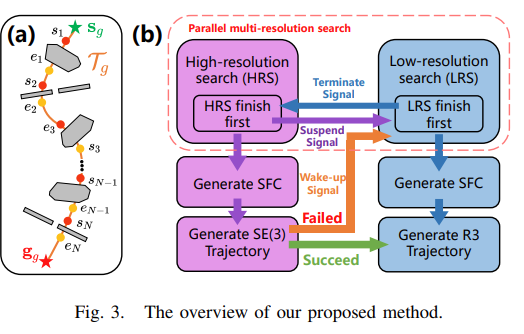
그 후에는 생성된 경로에서 발생하는 충돌 지점 을 찾아낸다. 자세한 내용은 Fig.3 의 (a) 를 보자.
Question
- 쌍을 찾아내는 방식. 어떤 지점에서 각 지점에 대한 정보를 결정 짓는지?
B. Parallel Multi-resolution Search
본 논문에서 제안하는 multi-resolution search 는 우선 low-resolution map (LRM) 과 high-resolution map (HRM) 으로 구성된다. LRM 은 기체의 장축 길이 로 만들어지고 HRM 은 단축 길이 로 만들어 진다.
이를 위해 타원체로 정의한 것으로 보인다.
Note
- 이러한 방식의 문제점은 이전에 지적된 대로 타원체가 이상적이지 않은 경우에는, 좁은 틈의 통과 여부를 기체에 따라 틀리게 판단할 수 있다. (i.e. 가 기체의 가장 짧은 부분보다 더 짧은 경우)
따라서 LRM 은 앞선 방식과 동일하므로 Whole-body motion planning 이 필요하지 않고, HRM 에서 최적 제어가 필요하다고 볼 수 있다.
각 지도에 대해서 탐색이 이루어지고 가장 먼저 탐색이 완료된 지도에 대해 경로 계획이 이루어진다. (e.g. Terminal or Suspend sign)
planning 을 시도하더라고 infeasible 할 수 있으므로 이 때는 Suspend 하는 것이다.
C. SE(3) Trajectory Generation
이제 이전 챕터에서 planning 을 시도하는 경우, 이를 SE(3) sub-problem 으로 표현한다.
이제 로부터 까지를 연결하는 SFC 가 필요한데, Yang et al., Han et al., RILS 논문 모두 두 노드(or state) 간의 SFC 를 곧바로 생성하고 이는 두 corridor 간의 overlap을 야기하기도 한다.
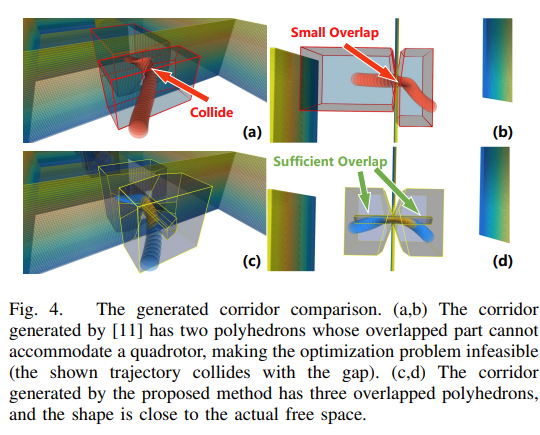
그래서 생성된 경로가 infeasible 해진다고 한다.
Note
- 왜 infeasible 해지고 기존 방식의 어떤 부분 때문인지 자세히 생각해보기
본 논문에서는 이 문제를 해결하기 위해 a simple seed generation method 을 도입하였다.
여기서는 구구절절 설명이 들어가서 그림을 보는 것이 이롭다.
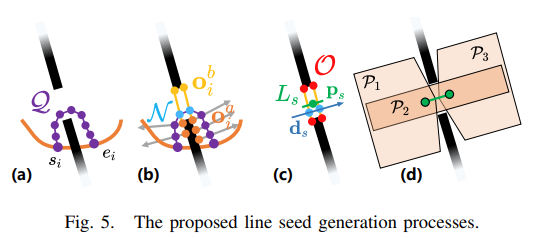
그림 (a) 에서는 전역 경로가 장애물에 막혔지만 옆에 좁은 틈을 지날 수 있게 만들어진 HRM 을 표현한 것이다.
경로 는 탐색으로 만들어졌고 경로점 에서 가장 가깝게 장애물로 인식된 지점(nearest occupied grid) 를 찾는다.
그리고 방향으로 탐색하여 첫 번째로 장애물로 인식된 지점(the first occupied grid) 를 찾아 이를 에 넣는다. 이 때 사용된 는 에 넣는다.
그러면 이제 좁은 틈의 가장자리(or 장애물 가장자리)로 생각할 수 있는 와 틈을 지나는 경로점 이 생긴다. 이 의 평균 방향을 라고 하고 의 중심을 중심점 로 정의한다.
의 길이를 방향 벡터 에 투영해서 얻어진 길이 로 line seed 를 얻는다. (Fig. 5. (c) 참고)
이제 의 양 끝점으로 polyhedron 를 만들고 를 line seed 로 하여 좁은 틈을 지나는 를 만든다.
이러한 방식으로 생성된 SFC 에서 경로 최적화가 safety & dynamic constraints 를 만족하도록 생성된다면 SE(3) segment 로 만들어지고,
그렇지 않으면 sub-problem 으로 분류되어 LRM 에서 low-resolution search(LRS) 가 일어난다.
D. R^3 Trajectory Generation
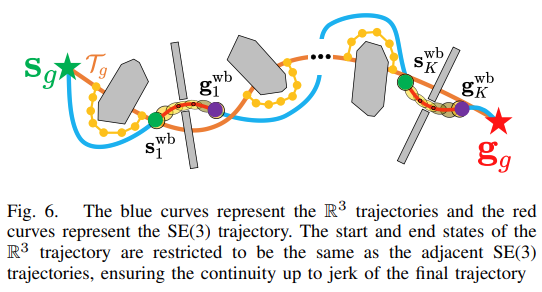
이제 충돌 지점마다 생길 수도 있는 개의 SE(3) 경로 조각들이 있다고 하자. 이 경로들은 start states 와 goal states 들로 이루어져 있다.
이제 global start state 와 첫 SE(3) 궤적, 혹은 연속적인 SE(3) 궤적이나 마지막 SE(3) 궤적과 global goal state 들 사이에 LRS 로 생긴 경로 혹은 충돌이 없던 전역 경로 가 있을 것이다.
이전에는 방식으로 사이에 있는 state 들이 있을 것이므로 이들을 각각 start or goal state 로 하여 경로 최적화를 해서 경로를 만들어 낸다.
Experiments
A. Benchmark Comparison
선행 연구들과 다양하게 비교하였다. 다만 본 연구 자체는 공개하지 않아서 추후에 비교가 어려워졌다.
요약하자면 Han et al. 보다 궤적이 짧거나 빠르다고 보긴 어렵지만, 비슷한 수준의 성능을 내는 대신 훨씬 빠른 속도로, 주어진 지도 없이 수행한다.
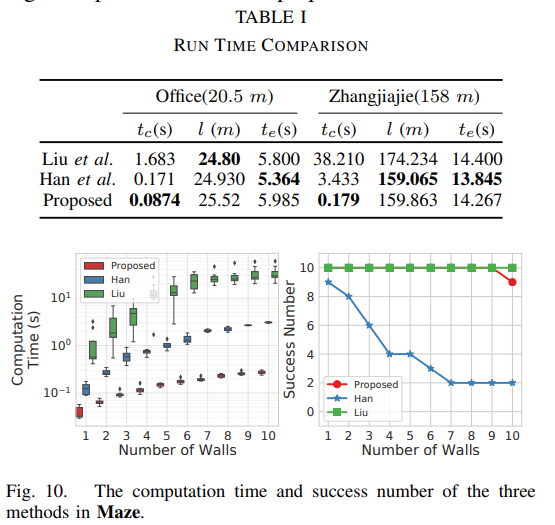
무엇보다도 Han et al. 보다 성공률이 월등히 높으며 search-based 방식의 Liu et al. 이 가장 높지만 이쪽은 시간이 너무 오래걸려서 실사용에는 어렵다.
B. Real-world Tests
실제 환경에서의 테스트가 굉장히 최신 연구들을 총집합하여 수행하였다.
-live 나 Fast-LIO2, Bubble Planner 등을 사용하였다.
Real-world tests
- Jiarong Lin and Fu Zhang. R3 live: A robust, real-time, rgbcolored, lidar-inertial-visual tightly-coupled state estimation and mapping package. In 2022 International Conference on Robotics and Automation (ICRA), pages 10672–10678, 2022.
- Jiarong Lin and Fu Zhang. R3 live++: A robust, real-time, radiance reconstruction package with a tightly-coupled lidarinertial-visual state estimator. arXiv preprint arXiv:2209.03666, 2022.
- Wei Xu, Yixi Cai, Dongjiao He, Jiarong Lin, and Fu Zhang. Fast-lio2: Fast direct lidar-inertial odometry. IEEE Transactions on Robotics, 2022.
- Fangcheng Zhu, Yunfan Ren, and Fu Zhang. Robust real-time lidar-inertial initialization. arXiv preprint arXiv:2202.11006, (Accepted by 2022 IROS), 2022.
- Guozheng Lu, Wei Xu, and Fu Zhang. Model predictive control for trajectory tracking on differentiable manifolds. arXiv preprint arXiv:2106.15233, 2021.
- Yunfan Ren, Fangcheng Zhu, Wenyi Liu, Zhepei Wang, Yi Lin, Fei Gao, and Fu Zhang. Bubble planner: Planning high-speed smooth quadrotor trajectories using receding corridors. arXiv preprint arXiv:2202.12177, (Accepted by 2022 IROS), 2022.
We use an on-manifold model predictive controller [24] to perform high-accuracy trajectory tracking. To realize online planning and cope with newly sensed obstacles during the flight, we adopt a distance-triggered receding horizon planning scheme from our previous work [3]
사실 “To realize online planning and cope with newly sensed obstacles during the flight” 부분이 조금 이해가지 않지만 manifold 에서의 MPC 와 Bubble planner 논문을 볼 필요가 있어 보인다.
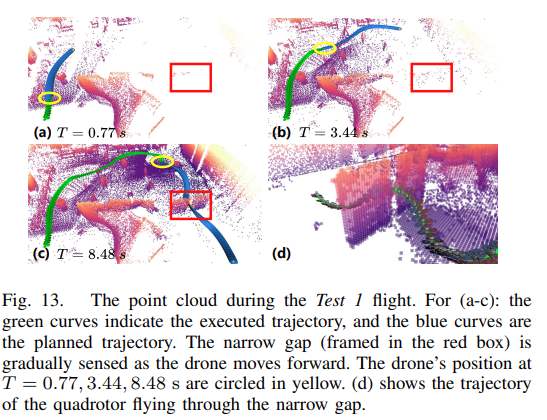
결과에 대한 사진과 영상도 잘 나와 있다. 인상 깊었던 것은 Fig. 13. 에서 시각화를 어떤 식으로 하였는지 궁금하다. Pointcloud가 반투명 Box 형태로 나오는 것도 보기에 굉장히 좋아보이지만, 모델링한 드론의 움직임이 프레임 별로 모델 / 타원체로 잘 표현되어 있다.
Conclusion and Future work
본 논문에서 꼽은 한계점으로는 좁은 틈의 한 쪽만 인식하기 때문에 좁은 틈이 길게 나 있는 경우에는 지나갈 수 없지만, 이를 파악할 수 있는 방식의 경로 계획은 아니다.
이를 위해서는 lateral motion 으로 nonzero roll angle 을 유지할 수 있어야 한다고 한다. 이를 perception-aware planning 을 통해 좁은 틈을 제대로 인식하여야 한다고 한다.
Note
- 조금 더 생각해보면, 라이다의 센서 범위의 영향이 있을 것 같다. 그리고 좁은 틈이나 whole-body motion planning 이 필요한 상황이 좁은 틈을 넘어 심하거나, 연속적으로 있는 경우는 어떤 식으로 해결할 수 있을지 궁금하다. (대다수는 unfeasible 하여 경로가 생기지 않을 것 같지만)
- 또한, 본 논문에서는 동적 장애물까지 해결할 수 있는지에 대한 논의가 없다. 처음 비판하였던 수 백 의 시간이 비슷하게 나왔고, 동적 장애물이 생겼을 때의 순간적인 연산속도가 회피하기에 충분한지도 궁금하다.
정리 끄읏.